
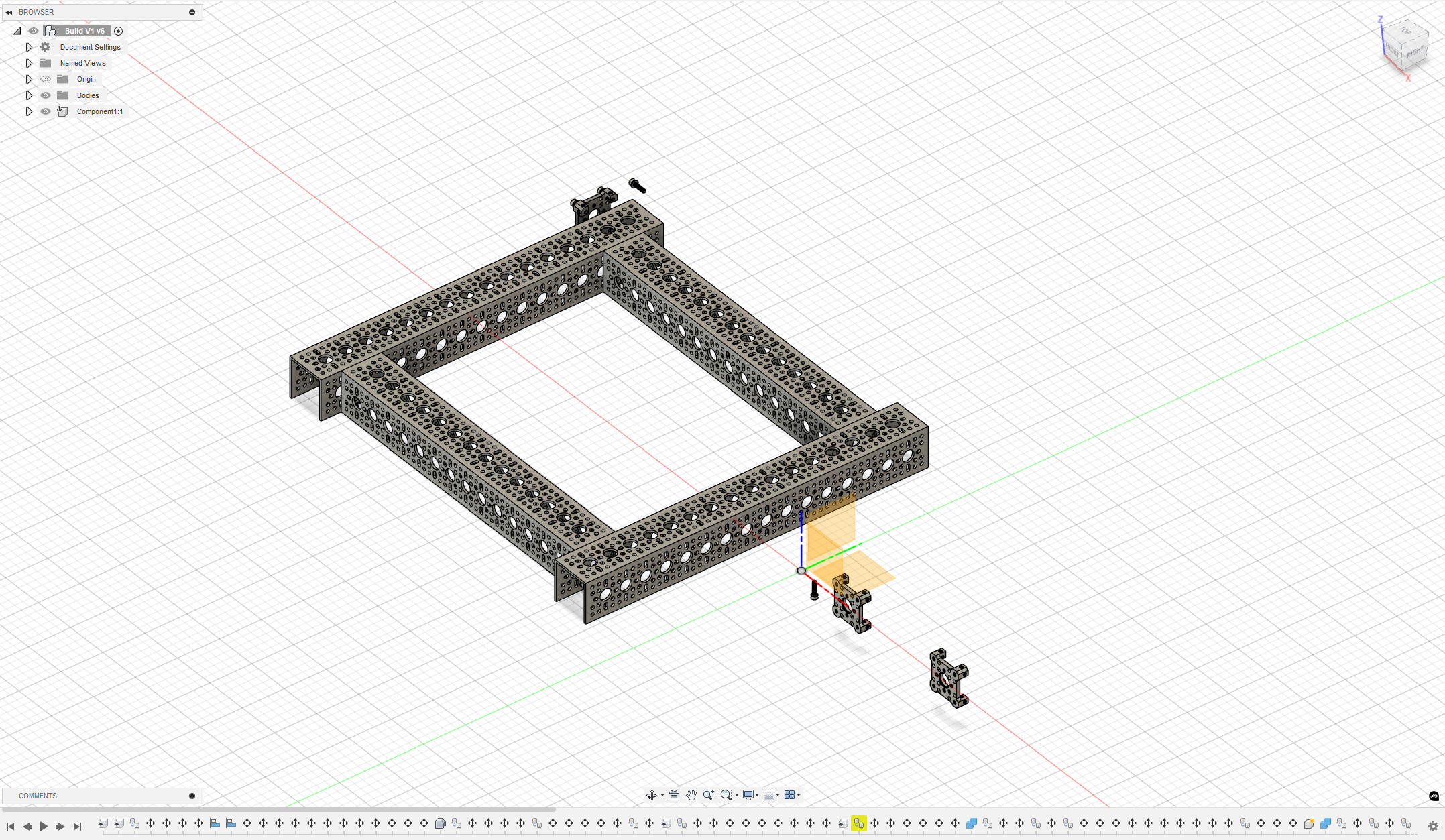
The robot that will revolutionize the future of navigation for the visually-impaired… BLINDBOT: a robotic “seeing-eye dog” robot that utilizes a Mecanum drivetrain for omni-directional movement, 360° view camera system for obstacle detection and avoidance, and a path-planner utilizing Google Maps API to guide the blind and visually-impaired to their destinations in a safe, efficient manner. (Background is early V1 prototyping stage)
Changing Visually-Impaired Navigation
About Us & Our Mission
We are an organization dedicated to revolutionizing the field of Visually-Impaired Navigation by utilizing vehicle robotics, machine-learning techniques, and path-planning algorithms. For a long time, ground-based navigation for the visually-impaired consisted of only a few options, each with their own drawbacks. Examples of this include the walking cane, or “white cane”, that can only detect immediate obstacles and has a limited range of use. Another example is the “seeing-eye dog”, which is highly reliable in guiding the visually-impaired, yet requires quite a bit of additional responsibility and attention, and is not as compatible of an option for those without the faculties to take care of a pet.
This is where robotics comes in. A robot does not need any supervision and requires very little maintenance, which providing the same or even better navigation reliance than “seeing-eye dogs”. On top of that, robots can provide navigation for specific destinations and can sense obstacles in the environment from farther ahead. Overall, robotics is one of the best optimizations to this problem and stands to revolutionize the field of Visually-Impaired Navigation. We recognize this, and we have made it our goal to bring this revolution to fruition: a robotic “seeing-eye dog” for visually-impaired persons navigation. However, this robot is only one step in our overall goal. Our overall goal is to one day have a world where the visually-impaired can safely and reliably navigate and reach their desired destinations.

